JetStream SIOT Store
- Author: Cliff Brake, last updated: 2024-01-24
- Status: discussion
Problem
SQLite has worked well as a SIOT store. There are a few things we would like to improve:
- Synchronization of history
- Currently, if a device or server is offline, only the latest state is transferred when connected. We would like all history that has accumulated when offline to be transferred once reconnected.
- We want history at the edge as well as cloud
- This allows us to use history at the edge to run more advanced algorithms like AI
- We currently have to re-compute hashes all the way to the root node anytime
something changes
- This may not scale to larger systems
- Is difficult to get right if things are changing while we re-compute hashes
- it requires some type of coordination between the distributed systems, which we currently don’t have.
Context/Discussion
The purpose of this document is to explore storing SIOT state in a NATS JetStream store. SIOT data is stored in a tree of nodes and each node contains an array of points. Note, the term “node” in this document represents a data structure in a tree, not a physical computer or SIOT instance. The term “instance” will be used to represent devices or SIOT instances.
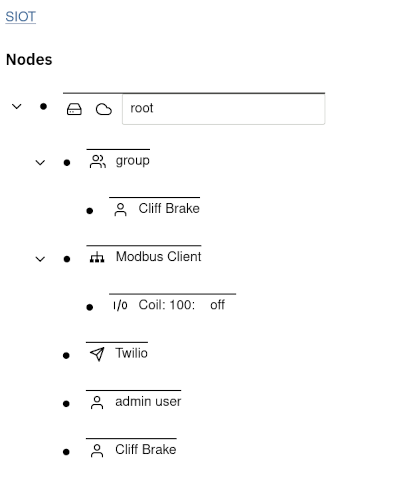
Nodes are arranged in a directed acyclic graph.
A subset of this tree is synchronized between various instances as shown in the below example:
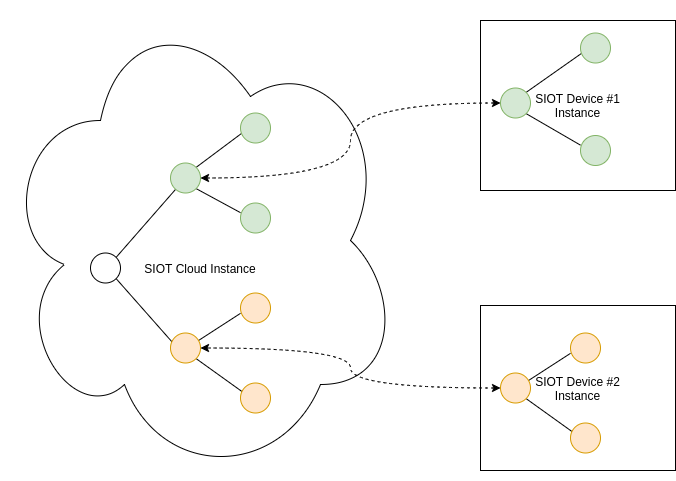
The tree topology can be as deep as required to describe the system. To date, only the current state of a node is synchronized and history (if needed) is stored externally in a time-series database like InfluxDB and is not synchronized. The node tree is an excellent data model for IoT systems.
Each node contains an array of points that represent the state of the node. The points contain a type and a key. The key can be used to describe maps and arrays. We keep points separate so they can all be updated independently and easily merged.
With JetStream, we could store points in a stream where the head of the stream represents the current state of a Node or collection of nodes. Each point is stored in a separate NATS subject.
NATS JetStream is a stream-based store where every message in a stream is given a sequence number. Synchronization is simple in that if a sequence number does not exist on a remote system, the missing messages are sent.
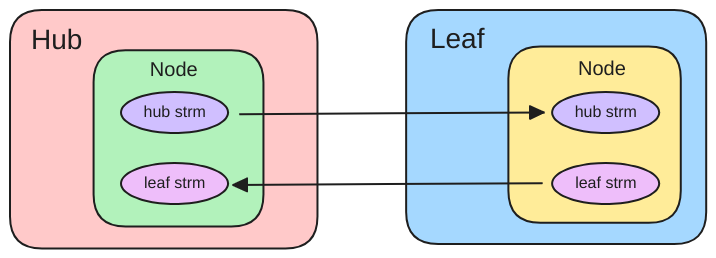
NATS also supports leaf nodes (instances) and streams can be synchronized between hub and leaf instances. If they are disconnected, then streams are “caught up” after the connection is made again.
Several experiments have been run to understand the basic JetStream functionality in this repo.
- Storing and extracting points in a stream
- Using streams to store time-series data and measure performance
- Syncing streams between the hub and leaf instances
Advantages of JetStream
- JetStream is built into NATS, which we already embed and use.
- History can be stored in a NATS stream instead of externally. Currently, we use an external store like InfluxDB to store history.
- JetStream streams can be synchronized between instances.
- JetStream has various retention models so old data can automatically be dropped.
- Leverage the NATS AuthN/AuthZ features.
- JetStream is a natural extension of core NATS, so many of the core SIOT concepts are still valid and do not need to change.
Challenges with moving to JetStream
- Streams are typically synchronized in one direction. This is a challenge for SIOT as the basic premise is data can be modified in any location where a user/device has proper permissions. A user may change a configuration in a cloud portal or on a local touch-screen.
- Sequence numbers must be set by one instance, so you can’t have both a leaf and hub nodes inserting data into a single stream. This has benefits in that it is a very simple and reliable model.
- We are constrained by a simple message subject to label and easily query data. This is less flexible than an SQL database, but this constraint can also be an advantage in that it forces us into a simple and consistent data model.
- SQLite has a built-in cache. We would likely need to create our own with JetStream.
JetStream consistency model
From this discussion:
When the doc mentions immediate consistency, it is in contrast to eventual consistency. It is about how ‘writes’ (i.e. publishing a message to a stream).
JetStream is an immediately consistent distributed storage system in that every new message stored in the stream is done so in a unique order (when those messages reach the stream leader) and that the acknowledgment that the storing of the message has been successful only happens as the result of a RAFT vote between the NATS JetStream servers (e.g. 3 of them if replicas=3) handling the stream.
This means that when a publishing application receives the positive acknowledgement to it’s publication to the stream you are guaranteed that everyone will see that new message in their updates in the same order (and with the same sequence number and time stamp).
This ‘non-eventual’ consistency is what enables ‘compare and set’ (i.e. compare and publish to a stream) operations on streams: because there can only be one new message added to a stream at a time.
To map back to those formal consistency models it means that for writes, NATS JetStream is Linearizable.
Currently SIOT uses a more “eventually” consistent model where we used data structures with some light-weight CRDT proprieties. However, this has the disadvantage that we have to do things like hash the entire node tree to know if anything has changed. In a more static system where not much is changing, this works pretty well, but in a dynamic IoT system where data is changing all the time, it is hard to scale this model.
Message/Subject encoding
In the past, we’ve used the Point data structure. This has worked extremely well at representing reasonably complex data structures (including maps and arrays) for a node. Yet it has limitations and constraints that have proven useful it making data easy to store, transmit, and merge.
// Point is a flexible data structure that can be used to represent
// a sensor value or a configuration parameter.
// ID, Type, and Index uniquely identify a point in a device
type Point struct {
//-------------------------------------------------------
//1st three fields uniquely identify a point when receiving updates
// Type of point (voltage, current, key, etc)
Type string `json:"type,omitempty"`
// Key is used to allow a group of points to represent a map or array
Key string `json:"key,omitempty"`
//-------------------------------------------------------
// The following fields are the values for a point
// Time the point was taken
Time time.Time `json:"time,omitempty" yaml:"-"`
// Instantaneous analog or digital value of the point.
// 0 and 1 are used to represent digital values
Value float64 `json:"value,omitempty"`
// Optional text value of the point for data that is best represented
// as a string rather than a number.
Text string `json:"text,omitempty"`
// catchall field for data that does not fit into float or string --
// should be used sparingly
Data []byte `json:"data,omitempty"`
//-------------------------------------------------------
// Metadata
// Used to indicate a point has been deleted. This value is only
// ever incremented. Odd values mean point is deleted.
Tombstone int `json:"tombstone,omitempty"`
// Where did this point come from. If from the owning node, it may be blank.
Origin string `json:"origin,omitempty"`
}
With JetStream, the Typeand Key can be encoded in the message subject:
p.<node id>.<type>.<key>
Message subjects are indexed in a stream, so NATS can quickly find messages for any subject in a stream without scanning the entire stream (see discussion 1 and discussion 2).
Over time, the Point structure has been simplified. For instance, it used to
also have an Index field, but we have learned we can use a single Key field
instead. At this point it may make sense to simplify the payload. One idea is to
do away with the Value and Text fields and simply have a Data field. The
components that use the points have to know the data-type anyway to know if they
should use the Value or Textfield. In the past, Protobuf encoding was used
as we started with quite a few fields and provided some flexibility and
convenience. But as we have reduced the number of fields and two of them are now
encoded in the message subject, it may be simpler to have a simple encoding for
Time, Data, Tombstone, and Origin in the message payload. The code using
the message would be responsible for convert Data into whatever datatype is
needed. This would open up the opportunity to encode any type of payload in the
future in the Data field and be more flexible for the future.
Message payload:
Time(uint64)Tombstone(byte)OriginLen(byte)Origin(string)Data Type(byte)Data(length determined by the message length subtracted by the length of the above fields)
Examples of types:
- 0 - unknown or custom
- 1 - float (32, or 64 bit)
- 2 - int (8, 16, 32, or 64 bit)
- 3 - unit (8, 16, 32, or 65 bit)
- 4 - string
- 5 - JSON
- 6 - Protobuf
Putting Origin in the message subject will make it inefficient to query as you
will need to scan and decode all messages. Are there any cases where we will
need to do this? (this is an example where an SQL database is more flexible).
One solution would be to create another stream where the origin is in the
subject.
There are times when the current point model does not fit very well - for instance when sending a notification - this is difficult to encode in an array of points. I think in these cases encoding the notification data as JSON probably makes more sense and this encoding should work much better.
Can’t send multiple points in a message
In the past, it was common to send multiple points in a message for a node - for
instance when creating a node, or updating an array. However, with the type
and key encoded in the subject this will no longer work. What is the
implication for having separate messages?
- Will be more complex to create nodes
- When updating an array/map in a node, it will not be updated all at once, but over the time it takes all the points to come into the client.
- There is still value in arrays being encoded as points - for instance a relay devices that contains two relays. However, for configuration are we better served by encoding the struct in a the data field as JSON and updating it as an atomic unit?
UI Implications
Because NATS and JetStream subjects overlap, the UI could subscribe to the current state changes much as is done today. A few things would need to change:
- Getting the initial state could still use the
NATS
nodesAPI. However, theValueandTextfields might be merged intoData. - In the
p.<node id>subscription, theTypeandKeynow would come from the message subject.
Bi-Directional Synchronization
Bi-directional synchronization between two instances may be accomplished by having two streams for every node. The head of both incoming and outgoing streams is looked at to determine the current state. If points of the same type exist in both streams, the point with the latest timestamp wins. In reality, 99% of the time, one set of data will be set by the Leaf instance (ex: sensor readings) and another set of data will be set by the upstream Hub instance (ex: configuration settings) and there will be very little overlap.
The question arises - do we really need bi-directional synchronization and the complexity of having two streams for every node? Every node includes some amount of configuration which can flow down from upstream instances. Additionally, many nodes are collecting data which needs to flow back upstream. So it seems a very common need for every node to have data flowing in both directions. Since this is a basic requirement, it does not seem like much of stretch to allow any data to flow in either stream, and then merge the streams at the endpoints where the data is used.
Does it make sense to use NATS to create merged streams?
NATS can source streams into an additional 3rd stream. This might be useful in that you don’t have to read two streams and merge the points to get the current state. However, there are several disadvantages:
- Data would be stored twice
- Data is not guaranteed to be in chronological order - the data would be inserted into the 3rd stream when it is received. So you would still have to walk back in history to know for sure if you had the latest point. It seems simpler to just read the head of two streams and compare them.
Timestamps
NATS JetStream messages store a timestamp, but the timestamp is when the message is inserted into the stream, not necessarily when the sample was taken. There can be some delay between the NATS client sending the message and the server processing it. Therefore, an additional high-resolution 64-bit timestamp is added to the beginning of each message.
Edges
Edges are used to describe the connections between nodes. Nodes can exist in
multiple places in the tree. In the below example, N2 is a child of both N1
and N3.
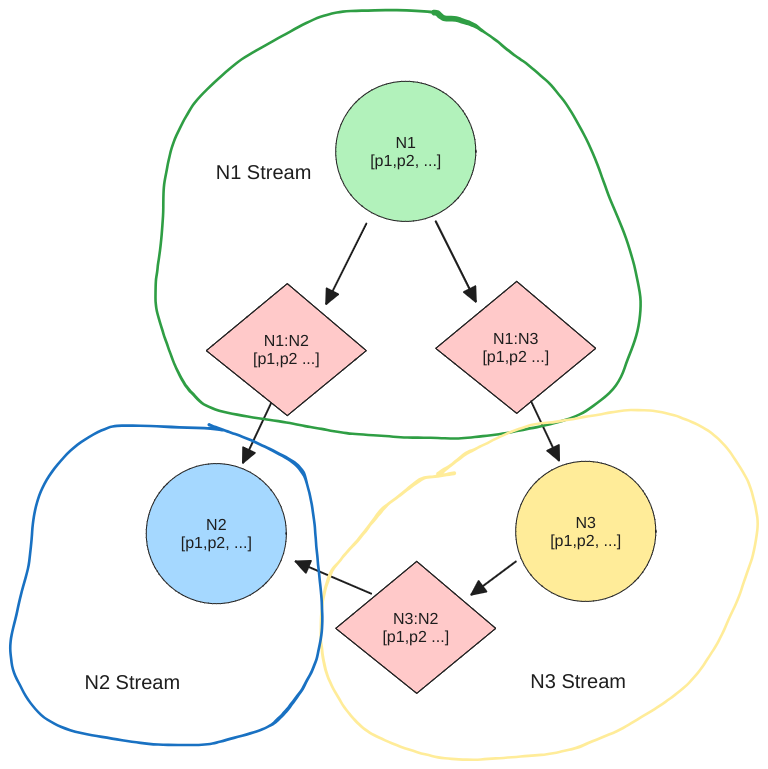
Edges currently contain the up and downstream node IDs, an array of points, and a node type. Putting the type in the edge made it efficient to traverse the tree by loading edges from a SQLite table and indexing the IDs and type. With JetStream it is less obvious how to store the edge information. SIOT regularly traverses up and down the tree.
- Down: to discover nodes
- Up: to propagate points to up subjects
Because edges contain points that can change over time, edge points need to be stored in a stream, much like we do the node points. If each node has its own stream, then the child edges for the node could be stored in the same stream as the node as shown above. This would allow us to traverse the node tree on startup and perhaps cache all the edges. The following subject can be used for edge points:
p.<up node ID>.<down node ID>.<type>.<key>
Again, this is very similar to the existing NATS API.
Two special points are present in every edge:
nodeType: defines the type of the downstream nodetombstone: set to true if the downstream node is deleted
One challenge with this model is much of the code in the SIOT uses a
NodeEdge data structure which includes a node and its parent edge. This
collection of data describes this instance of a node and is more useful from a
client perspective. However, NodeEdge’s are duplicated for every mirrored node
in the tree, so don’t really make sense from a storage and synchronization
perspective. This will likely become more clear after some implementation work.
NATS up.* subjects
In SIOT, we partition the system using the tree structure and nodes that listen
for messages (databases, messaging services, rules, etc.) subscribe to the
up.*stream of their parent node. In the below example, each group has it’s own
database configuration and the Db node only receives points generated in the
group it belongs to. This provides an opportunity for any node at any level in
the tree to listen to messages of another node, as long as:
- It is equal or higher in the structure
- Shares an ancestor.
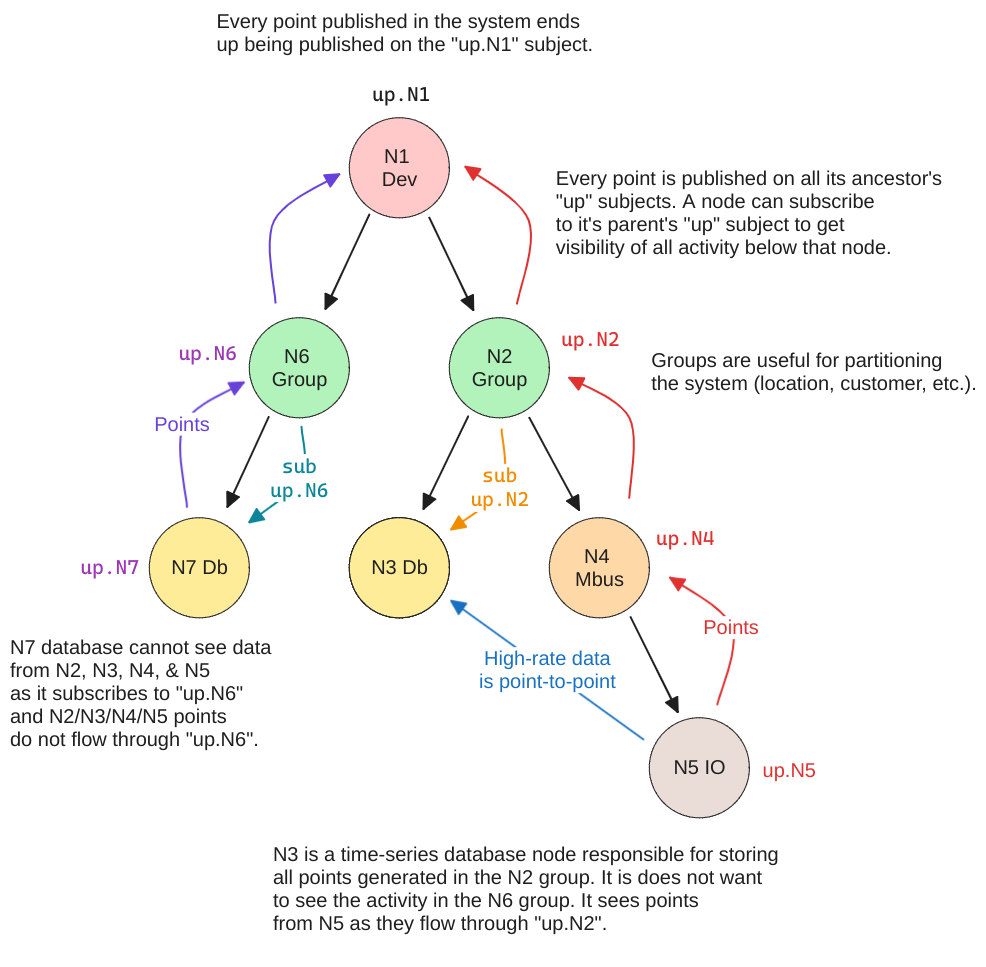
The use of “up” subjects would not have to change other than the logic that re-broadcasts points to “up” subjects would need to use the edge cache instead of querying the SQLite database for edges.
AuthN/AuthZ
Authorization typically needs to happen at device or group boundaries. Devices or users will need to be authorized. Users have access to all nodes in their parent group or device. If each node has its own stream, that will simplify AuthZ. Each device or user are explicitly granted permission to all the Nodes they have access to. If a new node is created that is a child of a node a user has permission to view, this new node (and the subsequent streams) are added to the list.
Are we optimizing the right thing?
Any time you move away from an SQL database, you should think long and hard about this. Additionally, there are very nice time-series database solutions out there. So we should have good reasons for inventing yet-another-database. However, mainstream SQL and Time-series databases all have one big drawback: they don’t support synchronizing subsets of data between distributed systems.
With system design, one approach is to order the problems you are solving by difficulty with the top of the list being most important/difficult, and then optimize the system to solve the hard problems first.
- Synchronizing subsets of data between distributed systems (including history)
- Be small and efficient enough to deploy at the edge
- Real-time response
- Efficient searching through history
- Flexible data storage/schema
- Querying nodes and state
- Arbitrary relationships between data
- Data encode/decode performance
The number of devices and nodes in systems SIOT is targeting is relatively small, thus the current node topology can be cached in memory. The history is a much bigger dataset so using a stream to synchronize, store, and retrieve time-series data makes a lot of sense.
On #7, will we ever need arbitrary relationships between data? With the node graph, we can do this fairly well. Edges contain points that can be used to further characterize the relationship between nodes. With IoT systems your relationships between nodes is mostly determined by physical proximity. A Modbus sensor is connected to a Modbus, which is connected to a Gateway, which is located at a site, which belongs to a customer.
On #8, the network is relatively slow compared to anything else, so if it takes a little more time to encode/decode data this is typically not a big deal as the network is the bottleneck.
With an IoT system, the data is primarily 1) sequential in time, and 2) hierarchical in structure. Thus, the streaming/tree approach still appears to be the best approach.
Questions
- How chatty is the NATS Leaf-node protocol? Is it efficient enough to use over low-bandwidth Cat-M cellular connections (~20-100Kbps)?
- Is it practical to have 2 streams for every node? A typical edge device may have 30 nodes, so this is 60 streams to synchronize. Is the overhead to source this many nodes over a leaf connection prohibitive?
- Would it make sense to create streams at the device/instance boundaries rather
than node boundaries?
- This may limit our AuthZ capabilities where we want to give some users access to only part of a cloud instance.
- How robust is the JetStream store compared to SQLite in events like power loss?
- Are there any other features of NATS/JetStream that we should be considering?
Experiments
Several proof-of-concept experiments have been run to prove the feasibility of this:
https://github.com/simpleiot/nats-exp
Decision
Implementation could be broken down into 3 steps:
- Message/subject encoding changes
- Switch store from SQLite to JetStream
- Use JetStream to sync between systems
objections/concerns
Consequences
What is the impact, both negative, and positive.